
Robótica guiada por visión
Los sistemas VGR (Vision Guided Robotic Systems) o sistema de guiado de robot por visión dotan de flexibilidad a la automatización de procesos con robótica. Un robot se programa para moverse entre puntos fijo precisos. En algunos casos está rigidez conlleva complicaciones debido a variaciones en el posicionamiento de pieza, o del útil de indexado o irregularidades aleatorias en contenedores. En tal caso el robot se encuentra ante tareas que no puede realizar eficazmente.
Un sistema de visión permite alcanzar la solución a esos problemas. El robot será capaz de reconocer su posición buscando el punto cero y reconocer así mismo la orientación y posicionamiento de la pieza con la que trabajar.
Los sistemas robóticos asistidos por visión se amoldan mejor a los requisitos específicos de cada fábrica y al proceso de fabricación en particular. Los sistemas de visión permiten determinar con extremada precisión la posición de cualquier objeto en el espacio, pudiendo definir cada uno de los puntos en un espacio 3D y dirigiendo al robot hasta el punto preciso donde debe acceder.
Este tipo de sistemas de guiado, no sólo sirven para entornos de manipulación de la industria robótica, sino que se pueden emplear en aplicaciones de marcaje láser, remachado, atornillado, montaje, soldadura, pintado, paletizado, despaletizado y muchos más.
Picking
Recoger piezas es una de las aplicaciones principales de la robótica y del guiado por visión. Mediante un sistema de visión artificial, se reconoce la posición en el espacio de un objeto y se establece las relaciones espaciales entre varios objetos para su posterior manipulación por el robot.
Pick and place
La técnica de pick and place en la industria es aquella en la que se debe seleccionar y colocar productos, llevando a cabo procesos de ordenar, recolocar, empaquetar y paletizar entre otros.
En este campo los sistemas de visión y robótica han aportado velocidad a un proceso que anteriormente era muy manual. Además de esa reducción de tiempo, reduce posibles equivocaciones y errores. Y otro punto a destacar es la liberación del trabajador de un proceso repetitivo y en ocasiones nada ergonómico.
En este sistema el principal inconveniente relacionado con la visión artificial es que las piezas no pueden estar unas encima de otras, ni solapadas. Por tanto, complica la operativa obligando a volcar las piezas sobre una cinta para que se diseminen o vibrarlas.
En este último caso, también se puede integrar la visión y los robots, dotando a los vibradores de mayor flexibilidad al poder utilizarse en más de una referencia de pieza siempre. El vibrador separa las piezas, la cámara es capaz de reconocer la pieza y además guiar al robot para que realice el pick and place de la pieza óptima.
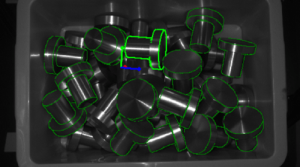
Bin picking
Mediante sistemas de visión 3D y software, las piezas son identificadas a pesar de su posición aleatoria y de encontrarse amontonadas a granel.
Este sistema VGR permite seleccionar y extraer piezas apiladas aleatoriamente en un contenedor. Al contrario que un sistema 2D, uno 3D consigue reconocer piezas superpuestas y en cualquier posición en el espacio. Para ello, hay que indicar al software la morfología de la pieza y el espacio (el contenedor) donde debe encontrar esa forma.
Posteriormente el software elegirá el mejor candidato para que el robot recoja la pieza de manera eficiente y reduciendo posibles errores. Dicho candidato será el mejor posicionado para que el robot pueda cogerlo con su pinza o garra.
Una vez calculada la trayectoria, el robot recoge la pieza en el menor tiempo posible y sin colisiones para continuar con la operativa programada (carga de máquinas, posicionamiento en otro útil, trasportadora, banco de ensayo, bandeja…)
Bin picking con robot colaborativo
Igual que en el caso anterior, los sistemas de guiado de robot para bin picking se han integrado en robots colaborativos.
Integrando una cámara 3D directamente sobre el cobot, este es capaz de realizar la tarea de picking cerca de humanos siempre con la programación y seguridades adecuadas al proceso.
La selección aleatoria desde contenedores ha sido un desafío para automatizar, por ello se deben utilizar tecnologías avanzadas, la visión 3D y el análisis 3D, para permitir el picking desde posiciones aleatorias. Lo que elimina la necesidad de sistemas de dosificación de piezas.
Bin picking con robots móviles autónomos
¿Y si ese robot colaborativo es capaz de moverse a puntos determinados de picking?
La solución actual que mayor flexibilidad dota a un almacén son los robots colaborativos sobre robot móviles autónomos (ARM). Capaces de moverse por la fábrica o almacén de modo seguro hasta los puntos de picking, envasado o paletizado. Además con la cámara 3D es capaz de realizar la operativa de bin picking y recoger productos a granel de contenedores o cajas.
Esto permite, por ejemplo, a las empresas de comercio electrónico automatizar tareas más complejas. Esto incluye recoger y colocar varios artículos en una bandeja o contenedor, así como conectar los procesos de producción con los robots móviles autónomos para una fabricación y manipulación de materiales flexibles.
