
Los robots móviles son cada vez más demandados y más común su integración tanto en el sector industrial como servicios. La industria y sus métodos de producción están sufriendo cambios y adaptándose a los nuevos mercados, ofreciendo productos muy variados, personalizados y fabricados en tiempo record. Con la denominada industria 4.0 se brindan avances tecnológicos que permiten a las empresas adaptar su producción, mejorar su productividad y la calidad de sus productos.
Hoy en día conviven los robots industriales con los robots colaborativos en las misma fabrica. Cada uno pre-diseñado para una labor acorde a sus capacidades. Lo que otorga flexibilidad a las empresas para adaptarse a nuevas posibilidad de producción. Así como automatizar procesos que antes no eran posibles por falta de espacio o por seguridad, ya que un humano tenía que compartir zona de trabajo con un robot. Este punto fue superado hace años con la aparición de los robots colaborativos.
Por otra parte los robots móviles (AGV o AMR) han permitido mejorar tiempos y facilitar el transporte de mercancías dentro de las plantas productivas.Yendo de un lugar a otro de las plantas como en el interior de los almacenes.
Entonces ¿cuál es el siguiente paso?
El robot colaborativo móvil. Robots colaborativos sobre ruedas que tendrán integradas las cualidades de los cobots y de los robots móviles.
Mediante aplicaciones de movilidad específicas, un solo cobot puede ser empleado para desempeñar distintas funciones, ya sea en distintas etapas de una misma línea de producción o en procesos de producción por lotes que requieran tareas puntuales y específicas.
Un tipo simplificado de esta combinación tecnológica consta de integrar un brazo robótico colaborativo sobre una estructura con ruedas, frenos y anclajes. En este caso un humano empujará al robot hasta el punto donde necesiten de sus funciones. Una opción más económica pero menos autónoma que un cobot sobre un robot móvil.
Por parte del robot móvil, además de la capacidad de desplazamiento, contará con autonomía, evasión de obstáculos y sincronización con maquinaria o vehículos móviles y, por su puesto, con las cualidades del cobot, tendrá la capacidad de poder trabajar en el mismo espacio con los humanos de forma segura. Esta integración hace más fácil su operabilidad y todo el sistema estará unificado tanto para la movilidad como para las tareas realizadas por el brazo robótico.
Distintas posibilidades de integración
Hay distintas maneras de lograr que un cobot sea móvil para adaptarse a las necesidades y posibilidad de cada empresa.
A continuación se enumeran las tres posibilidades principales: carro, guia, integración sobre AGV o AMR.
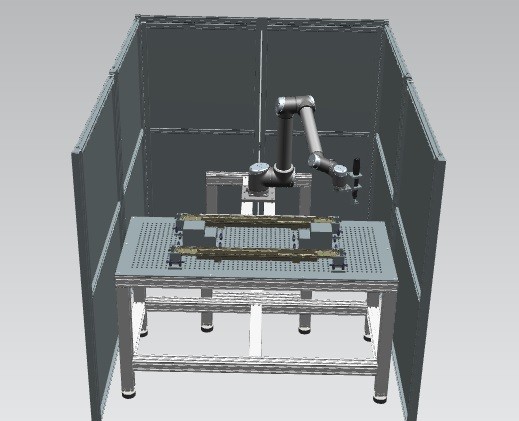
Sobre carro ligero
La opción más sencilla de implementar movilidad en un robot colaborativo. Colocar el robot sobre un carro con ruedas permite que el brazo sea empujado hasta la siguiente estación de trabajo. Una vez en su posición y centrado correctamente al punto cero, el carro debe fijarse al suelo con anclajes.
Muy útil para movimientos no constantes y frecuencia reducida. Pero con la versatilidad de desplazamiento por toda la planta.

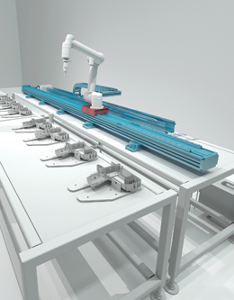
Sobre una guía automática o manual
Sistema compuesto principalmente por un robot sujeto a un raíl. Permite realizar un movimiento lateral para desplazar el robot de un puesto de trabajo a otro que está contiguo.
También útil cuando los desplazamientos deben realizarse dentro de un área acotada pero el brazo robótico no tiene el suficiente alcanza porque la pieza es demasiado grande.
En definitiva, muy útil para desplazamientos repetitivos en un área delimitada.
Sobre AGV o vehículos de guiado automático
Los AGV y los AMR pueden ser programados para desplazarse por almacenes inteligentes o fabricas. El abastecimiento de productos o de componentes a estaciones de picking o de montaje respectivamente, se realiza de manera autónoma por estos dispositivos.
Integrando un robot encima de un AGV se obtiene un sistema independiente que puede realizar el trabajo en distintos puntos y sincronizarse para llegar al puesto donde se le necesite.

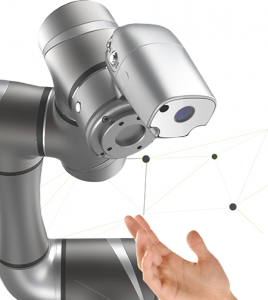
Con visión artificial mejor
Los robots móviles necesitan reconocer puntos que les sirvan de guía para posicionarse y realizar las tareas programadas. Con cámaras de visión artificial y el desarrollo de software los cobots son capaces de reconocer el punto cero de guía. Lo que facilita el posicionamiento físico del carro en la estación de trabajo. Sin el sistema de visión artificial su posicionamiento requiere de mayor precisión. Por ello la visión es muy útil cuando el robot es colocado por un humano. Además de dotar al robot de mayores posibilidades de automatización como el reconocimiento de piezas.
Ciertos robots colaborativos desarrollados en los últimos años ya integran el software y la cámara, siendo una opción muy versátil y rentable en el mercado.
Proyectos de robótica y automatización
Los robots colaborativos aportan valor añadido en numerosas industrias, desde la alimentación a la aeronáutica, pasando por la industria textil y farmacéuticas. Independientemente del sector, adaptándonos a las necesidades de cada empresa, en Movicontrol desarrollamos aplicaciones robóticas, tanto industriales como colaborativas, para la automatización de prácticamente cualquier proceso manual y repetitivo.
Ponte en contacto
¿Quieres saber el precio de un robot colaborativo o un robot móvil? Ponte en contacto para conocer más sobre los cobots y los robots autónomos y que te realicemos un oferta de instalación.
Te informaremos de las distintas posibilidades existentes de robótica colaborativa, así como estudiar tu caso en particular.
